
Ahli VIP
Pengiraan FMB Modul Fungsi (Reka Bentuk Pemandu) untuk Modul Linear Lexus
Pengiraan FMB Modul Fungsi (Reka Bentuk Pemandu) untuk Modul Linear Lexus
Perincian produk
Reka bentuk pemacu
Asas
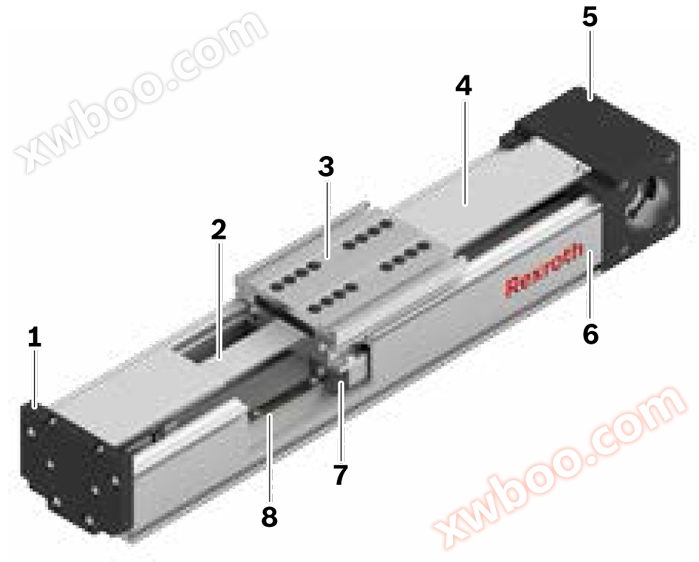
Apabila reka bentuk pemacu, komponen kuasa boleh dibahagikan kepada bahagian peranti mekanikal dan peranti pemacu.peranti mekanikalBahagian termasuk komponen sistem linear dan bahagian pemacu (pengurangan kelajuan atau secara langsung tanpa bahagian pemacu) serta mengambil kira beban. Kombinasi motor-unit kawalan bersama-sama dengan data fungsi yang sesuai dipanggil elektrikSistem pemacu.
Reka bentuk atau definisi saiz pemacu elektrik dilakukan pada titik rujukan poros motor. Semasa reka bentuk pemandu, had * dan nilai asas mesti dipertimbangkan. Had * mesti dipatuhi untuk mengelakkan kerosakan komponen mekanikal.

Data teknikal dan simbol formula peranti mekanikal
Semua komponen (sistem linear, pengurangan kelajuan) mesti menggunakan nilai had * tork pemacu dan kelajuan yang dibenarkan dan nilai asas tork geseran dan inersi putaran yang sesuai! “Memandu Data” Apabila mempertimbangkan asas reka bentuk pemacu, data teknikal berikut dan simbol formula yang mereka miliki digunakan dalam bahagian peranti mekanikal. Data dalam jadual di bawah disenaraikan dalam bab "Data Teknikal" atau dikira dengan formula pada halaman berikutnya.
|
|
peranti mekanikal |
|||
|
Beban |
Sistem Linear |
Bahagian pemacu Pengurang kelajuan |
||
|
Moment graviti |
(Nm) |
Mg 5) |
— |
— |
|
Moment gesekan |
(Nm) |
—4) |
MRs 3) |
MRge 3) |
|
Inerti berputar |
Malaysia2) |
Jt 1) |
JS 2) |
JGe 3) |
|
* Kelajuan yang dibenarkan |
(m/s) |
— |
dalamMaksimum 3) |
— |
|
* Kelajuan berputar |
(rpm) |
— |
np 1) |
nGe
|



Penyelidikan dalam talian
-
Kenalan
-
Syarikat
-
Telefon
-
E- mel
-
WeChat
-
Kod Pengesahan
-
Kandungan Mesej
-